Робот для сбора мусора на водоёмах
Robotics
RC
Автономное управление
Описание проекта
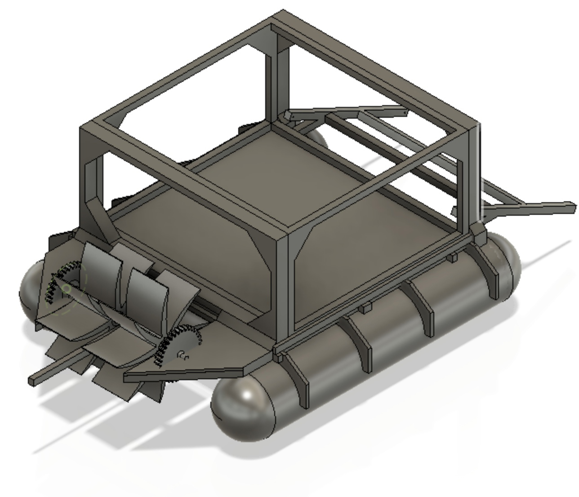
Лодка-сборщик мусора. Цель проекта заключается в создании максимально простой конструкции лодки для сбора мусора на водоёмах с автоматическим и ручным управлением. Были достигнуты следующие результаты:
- Создана простая конструкция из фанеры
- Подобраны комплектующие
- Собрана лодка с максимальной грузоподъёмностью 2 кг
- Написано ПО для дистанционного управления
- Написана простая программа автоматического управления